STAT 520 State Space Models and Kalman Filter 1 State SpaceModels A statespacemodelconsists of a stateequation Yt ΦtYt1 νt at and an observationequation zt HtYt µt bt where Yt is a state vector with a transition matrix Φt at are independent shocks with covariance matrices At Ht is the observation matrix and bt are another. AR MA and ARMA models in state-space form See SS Chapter 6 which emphasizes tting state-space models to data via the Kalman lter.

State Space 11 Tutorial And Worked Examples Youtube
ϕ 1 ϕ 2 σ 2.
. Gt is a p p matrices. U u y Cx D x Ax B 1 This represents the basic state-space equation where x a vector of the first-order state variables y the output vector x. Y t 1 0 α t α t 1 ϕ 1 ϕ 2 1 0 α t 1 0 η t.
Where X and X are the state vector and the differential state vector respectively. Once again the first thing that we do is clear all variables from the current environment and. Its many applications include.
Basic properties 8 System zeros and transfer function matrices 9 State-space model features 10 Controllability 11 Full-state feedback control 12. Yt μt γt εt t 1 T. State-space models Linear ltering The observed data fX tgis the output of a linear lter driven by white noise X.
This is contained in the file T4-llmR. Signals and systems. We know the state space model of a Linear Time-Invariant LTI system is - dotXAXBU YCXDU Apply Laplace Transform on both sides of the state equation.
Wt yt xt NmFt xt. State-Space Models Overview 1. State space models are a matrix form for linear time-invariant systems.
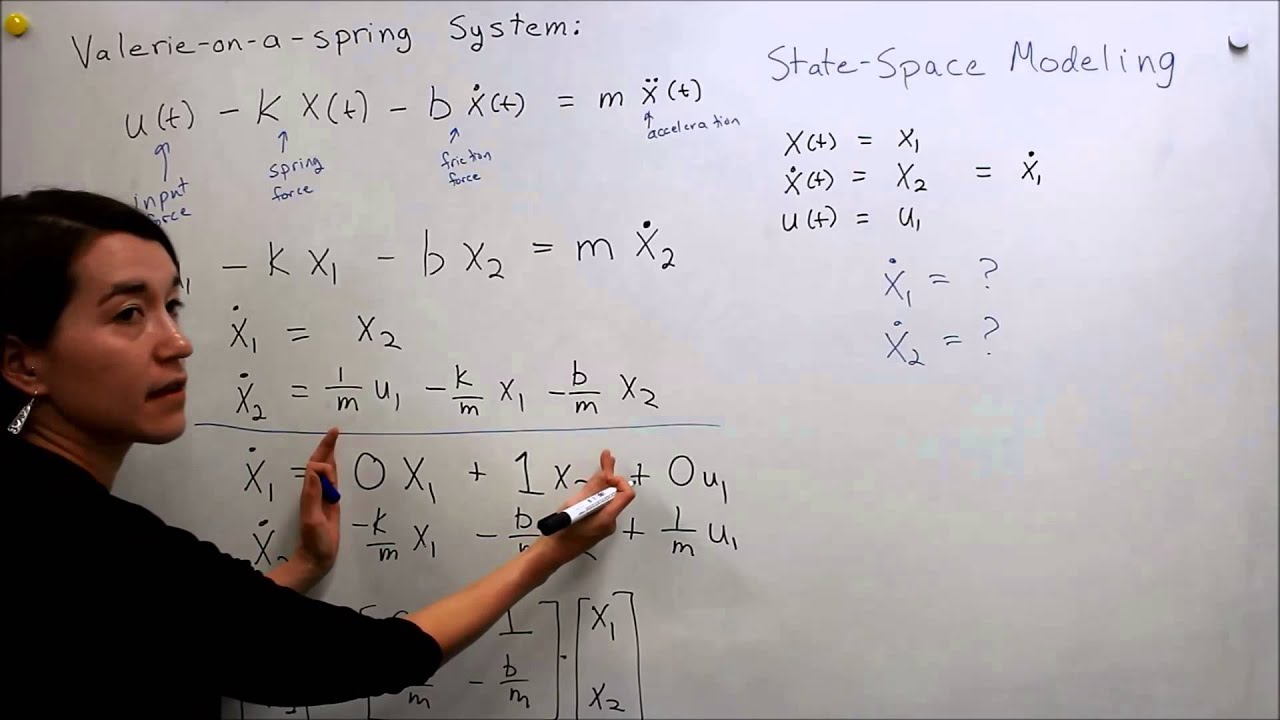
State-Space Model of a Force-Driven Mass For the simple example of a mass m driven by external force f along the x axis. 6 Developing state-space models based on transfer functions 7 State-space models. State space models provide a very flexible framework that has proved highly successful in analysing data arising in a wide array of disciplines such as to mention a few economics business and finance engineering physics hydrology and.
It describes a system with a set of first-order differential or difference equations using inputs outputs and state variables. To dealing with multivariable state-space model is most convenient. A n n system matrix.
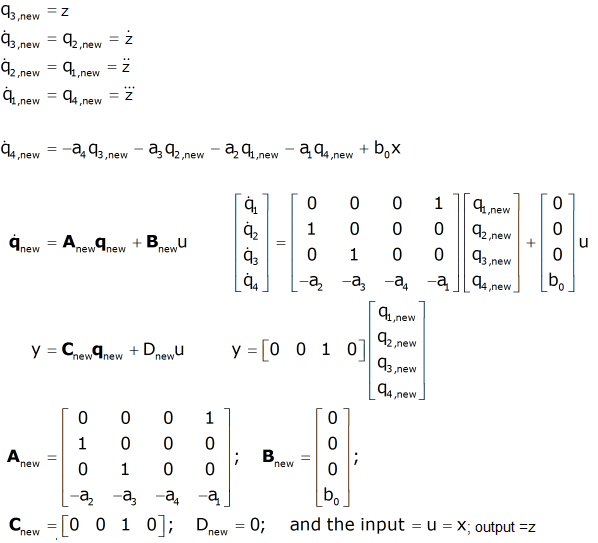
At this point the model is very general and an equation of any order can be set up for solution in the block parameters. 2005 one of the earliest SSMs for animal movement was developed to account for the peculiarities of Argos doppler shift location data Jonsen et al. C n n output matrix.
State-space models are well suited to handle the complex structure of many ecological data sets. State space models 3. Y t μ t γ t ε t t 1 T 11 where μt.
The state-space representation was introduced in the Introduction. Introduction to state-space models. Basic system model using the State-Space block.
Y n- dimensional output vector. C0 xt xt 1 NpGt xt 1. As planned this is the second part of the MPC series.
Create analyze and use state-space representations for control design. This model is a workhorse that carries a powerful theory of prediction. This can be put into state space form in the following way.
ARIMA and RegARMA models and dlm 5. T t T ϕ 1 ϕ 2 1 0 R t R 1 0 η t ϵ t 1 N 0 σ 2 There are three unknown parameters in this model. This introduction gives information on deriving a state space model from linear or no.
The first and the second equations are known as state equation and output equation respectively. State-space models parameterize the observed dependent variables as functions of unobserved. U r-dimensional control vector or input vector.
State-space models aka dynamic linear models DLM 2. When there is no direct connection between input and output in that case D u t is not taken. The state space model of Linear Time-Invariant LTI system can be represented as X A X B U.
For a SISO LTI system the state-space form is given below. This lecture introduces the linear state space dynamic system. ARMA models in state space form AR2 model y t 1y t 1 2y t 2 e t e t NID0 2 Let x t y t y t 1 and w t e t 0.
Where all the distributions are Gaussian. Ft x 0 vt m There is only one energy-storage element the mass and it stores energy in the form of kinetic energy Therefore. In this part a tool to setup the state-space model based predictive controller is provided.
Dynamical Linear Models can be regarded as a special case of the state space model. State-Space Modelling by Kevin Kotzé. Define State-space Model A 0 1 -1 -3 B 1 0 C 1 0 D 2 ssmodel controlssA B C D H controlss2tfssmodel printH Step response for the system t y controlstep_responseH pltplott y plttitleStep Response H pltxlabelt pltylabely pltgrid pltshow 0 0 1 1 3 0 1 0 1 0 0 2 State-space Model.
In this chapter let us discuss how to obtain transfer function from the state space model. U and Y are input vector and output vector respectively. The linear state space system is a generalization of the scalar AR1 process we studied before.
In the absence of these equations a model of a desired order or number of states can be. A state-space model is commonly used for representing a linear time-invariant LTI system. Z t Z 1 0 and.
Representing dynamics of higher-order linear systems. The setup program returns a function handle for the online MPC controller. A time series is a set of observations y1 yn y 1 y n ordered in time that may be expressed in additive form.
Statas sspace makes it easy to fit a wide variety of multivariate time-series models by casting them as linear state-space models including vector autoregressive moving-average VARMA models structural time-series STS models and dynamic-factor models. There are several different ways to describe a system of linear differential equations. For example the first difference correlated random walk model DCRW Jonsen et al.
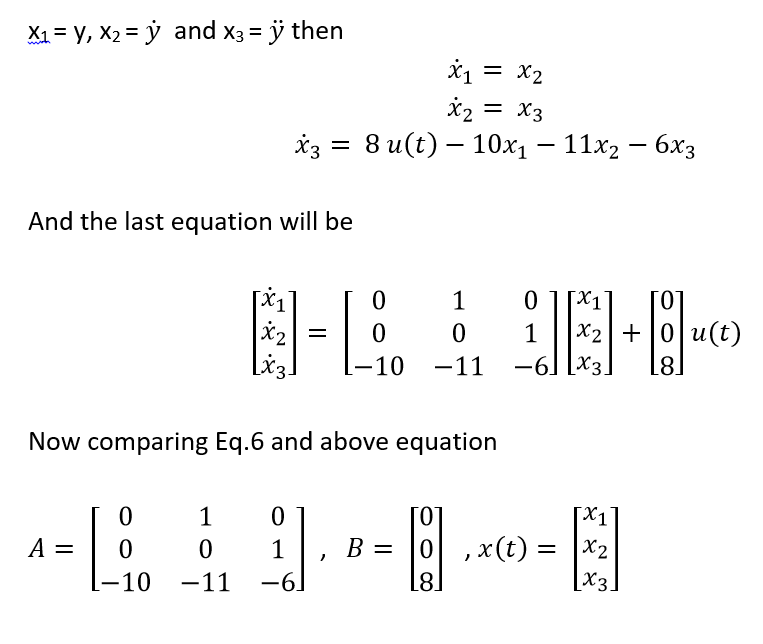
State Space Representation of nth order differential Equation. The equation inside the State-Space block is. 1 An Intuitive Example of a State Space Model.
1 2 where is an n by 1 vector representing the systems state variables is a scalar representing the input and is a scalar. This tutorial will introduce the attendees to the analysis and forecasting of time series by state space methods using R. B n r control matrix.
Then y t 1 0x t x t 1 2 1 0 x t 1 w t Now in state space form We can use Kalman filter to compute likelihood and forecasts. Y C X D U. Multivariable and State Space MPC V20.
Argos tags are often used to track. Ft is a p m matrices. Vt is a m m varianceco-variance matrix.
1 The local level model. MPC Tutorial II. The first program for this session makes use of a local level model that is applied to the measure of the South African GDP deflator.
Transfer Function from State Space Model.

State Space Representations Of Linear Physical Systems
Introduction To State Space Models Youtube
State Space Representations Of Linear Physical Systems
Control System State Space Model Javatpoint
Intro To Control 6 1 State Space Model Basics Youtube

State Space Representations Of Linear Physical Systems
State Space Part 1 Introduction To State Space Equations Youtube

State Space Analysis Of Control System Electrical4u
0 comments
Post a Comment